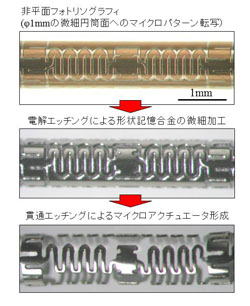
血管内に挿入する管状の器具であるカテーテルの先端や、体内に挿入する局所手術ツールの先端に能動的に屈曲あるいは回転動作させ,マイクロマニピュレータ機能を付加する円筒型マイクロアクチュエータの開発に取り組んでいます。外径0.5〜1mmの極細の形状記憶合金(TiNiCu合金等)のチューブの円筒面に非平面フォトリソグラフィ手法により,微細パターンを露光転写し、開口部の形状記憶合金(SMA)チューブを電解エッチングによる微細加工するプロセスを新たに開発し、チューブ状SMAマイクロアクチュエータを開発しています。また,同様の手法により,姿勢制御のためのバイアスばね機構をTiNi超弾性合金チューブから形成し,同軸上に精密に自己組立する手法を開発しました。
高機能で複雑なマイクロアクチュエータを一括形成でき、低コストでの大量生産を可能にする実用性の高い技術です。
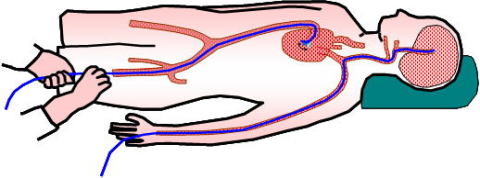
開発した能動カテーテル機構の屈曲動作(液中)

非平面フォトリソグラフィと電解エッチングによる
形状記憶/超弾性チューブの微細加工プロセス
形状記憶合金チューブアクチュエータと
超弾性バイアスばね機構の自己組立