力覚センサ・さくらんぼ収穫の力覚センシング
さくらんぼは山形の代表的な特産物です。収穫期が非常に短く、高齢化も進む果樹農家には収穫作業が大きな負担となっており、自動収穫機の実用化が望まれています。本研究室では妻木研究室(山形大学)と共同で、山形県「さくらんぼ世界一プロジェクト」の委託を受けて自動収穫技術開発に取り組んでいます。
さくらんぼ収穫には非常に繊細な作業が要求されます。人間の熟練者はスムースにもぎ取り作業を行うことができ、力加減や作用方向の重要性が経験的に知られていますが、感覚に基づいたものであり、これまで全く数値データ化されていませんでした。
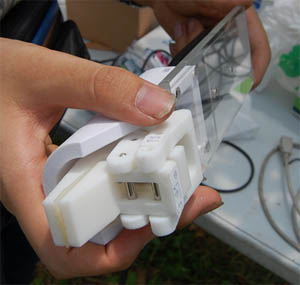
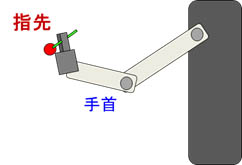
そこで本研究室では、多軸フォーストルクセンサや姿勢センサを内蔵したロボットハンド型計測システムを試作し、熟練者がもぎ取り作業するときの手首や指の動作を力学的に解析しています。この結果に基づき自動収穫ロボットハンドに最適な動きをさせ、スムーズな自動収穫の実現を目指しています。
さくらんぼ収穫の力覚センシング
多軸フォーストルクセンサ、姿勢センサを
内蔵した収穫作業の力覚センシングシステム